
价格
¥360,000.00
型号
MARS-2H
品牌
NOKOV
所在地
江苏省 南京市
更新时间
2023-01-05 00:17:01
浏览次数
次
其他推荐产品




 会员服务热线:010-62681193
展会合作/友情链接:010-62681114
会员服务热线:010-62681193
展会合作/友情链接:010-62681114


 京公网安备 11010802023672号
京公网安备 11010802023672号
机器人多智能体协同控制运动追踪和位姿数据动作捕捉系统
近年来,编队逐步走进大众视野,经常在一些重大会议或活动上给大家带来一场场视觉盛宴。多架编队技术在科研中被称为“多智能体协同控制”,这种技术并不只应用于表演性质的编队,更是可以应用于工业操作、巡逻侦察、灾情救援、环境勘探、智能物流、智能农业,和消费娱乐等方面。
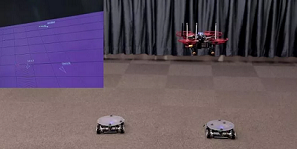
通过Nokov光学动作捕捉系统提供的高精度位置数据,无人车协同控制无论是在静态情况下还是动态行进状态下,都能很好地完场编队、跟随等协同任务。在静态情况下,偏移无人车会在位置数据更新后自动归队,完成自动列队任务。在运动情景下,当其中一辆无人车偏离预定的轨迹,不在编队内,Nokov光学动作捕捉系统会传回位置信息,然后在位置信息更新后,偏离路径的无人车会自动回归编队。
1、系统功能
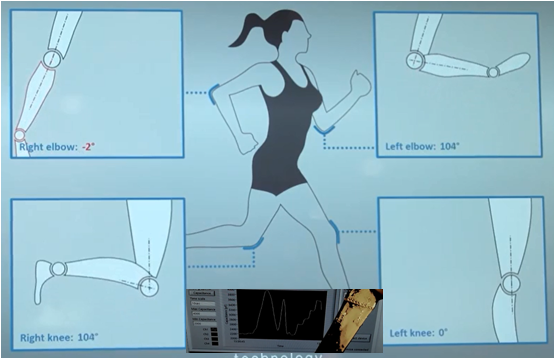
对机器人进行的运动追踪和位姿数据采集(六自由度、关节角度等运动学数据)
■ 实时反馈目标位置、角度等数据,为机器人的位姿控制、运动规划提供连贯、流畅的动作数据基础
■ 可通过SDK 将数据输入 Matlab、C++等软件进行二次开发和应用
机器人的运动控制和运动规划
■ 对机器人的运动、步态和位姿进行规划与控制
■ 对机器人运动规划与控制方法的检验与验证
■ “随动机器人” 运动、步态和位姿的控制
2、系统组成
光学定位提供数据类型
▪ 位置、姿态等数据
▪ 偏航角(Yaw)、横摇角(Roll)、俯仰角(Pitch)、四元数、欧拉角等数据
▪ 速度、加速度等基础运动信息
▪ 目标多智能体上任意部位的三维空间坐标及整体的空间位置
▪ 每个智能体的速度、加速度及其相对距离、速度等数据
▪ 人体、动物或机器人的关节角度
解决方案
▪ 为与机器人数据驱动与控制提供基础运动数据
▪ 在机器人、的运动规划与控制方法的验证中提供真值
▪ 为多智能体间的运动信息提供实时反馈
适用项目类型
▪ 空间控制、导航与制导
▪ 网络集群与网络化控制
▪ 多智能体编队与协同
▪ 的避障飞行与避障寻迹
▪ 动作规划与控制
3、适用机器人类型:
工业机器人
机械臂
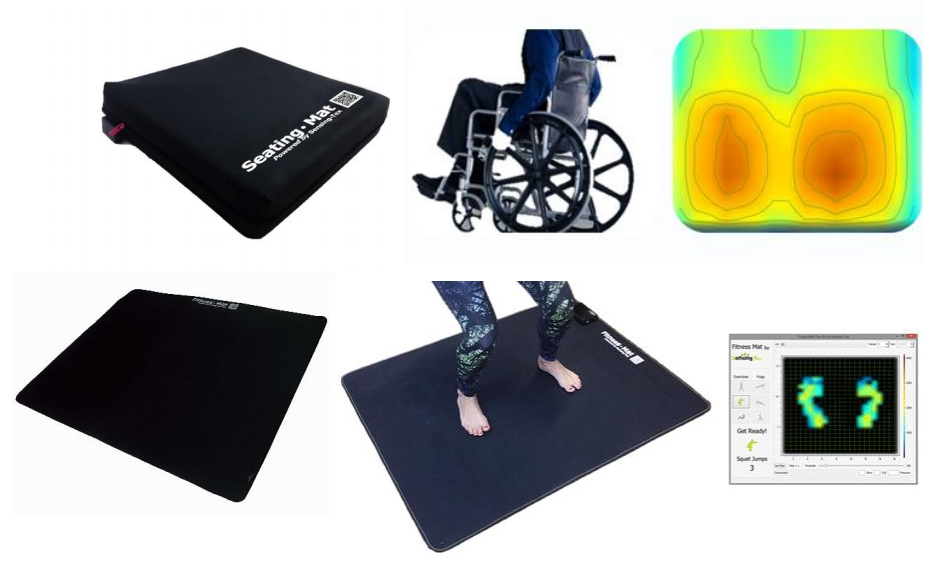
康复机器人
仿生机器人
特种机器人
移动机器人
多足机器人
外骨骼机器人